浙江省“七彩阳光”新高考研究联盟2017届高三下学期通用技术期初联考试卷
试卷日期:2017-12-13 考试类型:开学考试
一、选择题
-
1. 虚拟现实技术是一种可以创建和体验虚拟世界的计算机仿真系统;是仿真技术与计算机图形学、人机接口技术、多媒体技术、传感技术、网络技术等多种技术的集合;除了一般计算机所具有的视觉感知外,还有听觉感知、触觉感知、运动感知,甚至还包括味觉、嗅觉、感知等;虚拟现实技术已经被世界上一些大型企业广泛地应用到工业的各个环节。以下说法不正确的是( )A、可以创建和体验虚拟世界,体现了技术的目的性 B、是仿真技术与计算机图形学、传感技术等多种技术的集合,体现了技术综合性 C、除了一般计算机所具有的视觉感知外,还有听觉、触觉等感知,体现了技术的创新性 D、虚拟现实技术被广泛地应用到工业的各个环节,造成工人失业,体现了技术的两面性2. 航天员失重训练是利用失重飞机完成的。它可以完成抛物线飞行,形成15-40秒的微重力时间。使航天员感受、体验和熟悉失重环境,还可以进行人在失重的状态下从舱体爬出来的试验,训练太空的出舱活动。从技术试验方法看,该失重试验属于( )
 A、移植试验法 B、模拟试验法 C、强化试验法 D、虚拟试验法3. 如图所示是一把手工钢锯,以下关于其人机关系说法正确的是( )
A、移植试验法 B、模拟试验法 C、强化试验法 D、虚拟试验法3. 如图所示是一把手工钢锯,以下关于其人机关系说法正确的是( ) A、手柄握手处采用柔软橡胶材质体现了安全的目标 B、锯条安装采用元宝螺帽,方便快捷体现高效的目标 C、锯条长度与运锯时手臂推拉的距离相适宜考虑了人的静态尺寸 D、锯弓没有尖锐突角主要是考虑了特殊人群4. 如图所示是一款木质书架,板与板之间均采用如图所示的钉接方式。使用时发现图示虚线部分连接处极易松动,结构不牢固。出现该问题的主要原因是( )
A、手柄握手处采用柔软橡胶材质体现了安全的目标 B、锯条安装采用元宝螺帽,方便快捷体现高效的目标 C、锯条长度与运锯时手臂推拉的距离相适宜考虑了人的静态尺寸 D、锯弓没有尖锐突角主要是考虑了特殊人群4. 如图所示是一款木质书架,板与板之间均采用如图所示的钉接方式。使用时发现图示虚线部分连接处极易松动,结构不牢固。出现该问题的主要原因是( ) A、设计之初没有明确材料、连接等的限制因素 B、加工工具选择错误,工艺精度差 C、没有提供具体的加工图 D、设计分析时,没有考虑使用者的尺寸需求5. 如图所示是一个壁厚相等的圆管状零件,要加工此零件,标注的尺寸至少需要( )
A、设计之初没有明确材料、连接等的限制因素 B、加工工具选择错误,工艺精度差 C、没有提供具体的加工图 D、设计分析时,没有考虑使用者的尺寸需求5. 如图所示是一个壁厚相等的圆管状零件,要加工此零件,标注的尺寸至少需要( )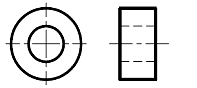 A、1 个 B、2 个 C、3 个 D、4 个6. 下列有关攻丝的操作方法,正确的是( )A、攻丝时需要一直施加压力 B、起攻时,应确保丝锥中心与孔中心重合 C、攻丝时应经常倒转丝锥以利于散热 D、攻丝时要用嘴及时吹掉铁屑7. 如图所示的吊床,人躺上去以后,吊绳和弧形支架的受力形式各为( )
A、1 个 B、2 个 C、3 个 D、4 个6. 下列有关攻丝的操作方法,正确的是( )A、攻丝时需要一直施加压力 B、起攻时,应确保丝锥中心与孔中心重合 C、攻丝时应经常倒转丝锥以利于散热 D、攻丝时要用嘴及时吹掉铁屑7. 如图所示的吊床,人躺上去以后,吊绳和弧形支架的受力形式各为( ) A、受拉、受压 B、受拉、受弯曲 C、受弯曲、受拉 D、受压、受拉8. 如图所示为豆奶、豆腐花、豆腐制作工艺流程,下列关于该流程的说法中正确是( )
A、受拉、受压 B、受拉、受弯曲 C、受弯曲、受拉 D、受压、受拉8. 如图所示为豆奶、豆腐花、豆腐制作工艺流程,下列关于该流程的说法中正确是( )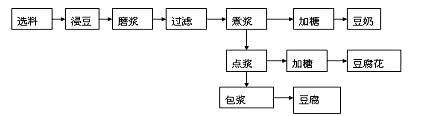 A、流程中“加糖”和“包浆”是串行工序 B、流程中“磨浆”和“过滤”是并行工序 C、豆奶、豆腐花、豆腐的制作都必须经过“煮浆”工序 D、“煮浆”和“过滤”时序上可以颠倒9. 某大学团队设计改进了现有的ATM机,制作了如图所示新型的ATM机,下列关于该ATM机系统的说法不正确的是( )
A、流程中“加糖”和“包浆”是串行工序 B、流程中“磨浆”和“过滤”是并行工序 C、豆奶、豆腐花、豆腐的制作都必须经过“煮浆”工序 D、“煮浆”和“过滤”时序上可以颠倒9. 某大学团队设计改进了现有的ATM机,制作了如图所示新型的ATM机,下列关于该ATM机系统的说法不正确的是( ) A、该ATM机的活动屏幕和控制面板尺寸相适应,体现了系统的相关性 B、ATM机的活动屏幕更方便残疾人使用,体现了系统的目的性 C、该团队根据人机工程学,经过精确的数学计算,确定了ATM机活动屏幕的高度范围和角度范围,体现了系统分析的科学性原则 D、团队的人员数量和设计水平是影响该系统优化的约束条件10. 如图所示是智能清洁机器人,具有吸尘、防撞功能。吸尘系统用电机带动清扫刷转动,清扫灰尘并将灰尘集中于吸风口处,由吸尘机构制造的吸力将灰尘吸入灰尘存储器中。防撞系统中传感器检测周围的障碍物,单片机对信号加以判断,控制电机驱动轮子改变方向,躲避障碍。如果吸尘系统与防撞系统的被控对象分别为灰尘存储器和轮子,则以下分析正确的是( )
A、该ATM机的活动屏幕和控制面板尺寸相适应,体现了系统的相关性 B、ATM机的活动屏幕更方便残疾人使用,体现了系统的目的性 C、该团队根据人机工程学,经过精确的数学计算,确定了ATM机活动屏幕的高度范围和角度范围,体现了系统分析的科学性原则 D、团队的人员数量和设计水平是影响该系统优化的约束条件10. 如图所示是智能清洁机器人,具有吸尘、防撞功能。吸尘系统用电机带动清扫刷转动,清扫灰尘并将灰尘集中于吸风口处,由吸尘机构制造的吸力将灰尘吸入灰尘存储器中。防撞系统中传感器检测周围的障碍物,单片机对信号加以判断,控制电机驱动轮子改变方向,躲避障碍。如果吸尘系统与防撞系统的被控对象分别为灰尘存储器和轮子,则以下分析正确的是( ) A、吸尘系统属于开环控制,防撞系统属于闭环控制 B、吸尘系统的执行器是吸力 C、防撞系统的传感器可以选用红外传感器 D、防撞系统的控制器是单片机11. 【加试题】夏天,学校教室温度超过32℃,教室可以开空调。如图所示是一简易温控电路,用于夏天教室空调开启提醒器,当温度达到设定值,红色灯泡发光。分析该控制电路,下列说法错误的是( )
A、吸尘系统属于开环控制,防撞系统属于闭环控制 B、吸尘系统的执行器是吸力 C、防撞系统的传感器可以选用红外传感器 D、防撞系统的控制器是单片机11. 【加试题】夏天,学校教室温度超过32℃,教室可以开空调。如图所示是一简易温控电路,用于夏天教室空调开启提醒器,当温度达到设定值,红色灯泡发光。分析该控制电路,下列说法错误的是( )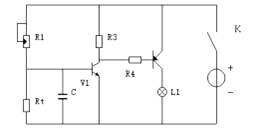 A、Rt是正温度系数的热敏电阻 B、红灯发光时,V1处于截止状态,V2处于饱和状态 C、达不到设定温度红灯就发光,可以将R1向上调节 D、R1滑动触头接触不良,在温度达到设定值时灯也可能不亮12. 【加试题】如图所示为门窗报警电路,当门和窗全都关上时,报警灯不亮,其中S1、S2是装在门窗上的微动开关,门窗关上时,S1、S2闭合。如果其中的与门集成块损坏了,则可以替换它而保持功能不变的是( )
A、Rt是正温度系数的热敏电阻 B、红灯发光时,V1处于截止状态,V2处于饱和状态 C、达不到设定温度红灯就发光,可以将R1向上调节 D、R1滑动触头接触不良,在温度达到设定值时灯也可能不亮12. 【加试题】如图所示为门窗报警电路,当门和窗全都关上时,报警灯不亮,其中S1、S2是装在门窗上的微动开关,门窗关上时,S1、S2闭合。如果其中的与门集成块损坏了,则可以替换它而保持功能不变的是( )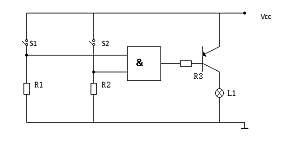 A、
A、 B、
B、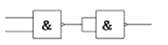 C、
C、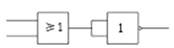 D、
D、 13. 【加试题】图中开关S闭合,按下按钮SW1,发光二极管D1发光。现要在a、b间接入元件,当松开按钮SW1后,D1能延时发光一段时间,则延时发光时间最长的元件(参数标在元件下方)是( )。
13. 【加试题】图中开关S闭合,按下按钮SW1,发光二极管D1发光。现要在a、b间接入元件,当松开按钮SW1后,D1能延时发光一段时间,则延时发光时间最长的元件(参数标在元件下方)是( )。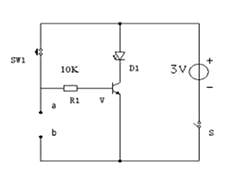 A、
A、 B、
B、 C、
C、 D、
D、
二、非选择题
-
14. 洲际弹道导弹是一种无人驾驶的无翼飞行器,以惯性制导为主。惯性制导(inertial guidance)是利用陀螺仪和加速度表组成的惯性测量装置测量导弹的运动参数,控制其按预定路线飞行的一种制导方式.整个制导系统由惯性测量装置、计算机和执行机构等组成.惯性测量装置测出导弹运动参数,计算机根据实时测得的数据、发射前输入的初始条件和重力影响等数据,算出导弹的实际飞行速度、航向、姿态和坐标,并将这些数据与制导程序要求的预定值进行比较,根据偏差值输出相应的制导指令,执行机构根据制导指令控制导弹沿正确的路线飞行.请根据示意图和描述,完成以下任务:
 (1)、该制导系统的控制手段和控制方式分别属于和(在①手动控制②自动控制③开环控制④闭环控制中选择合适的选项,将序号填写在横线处);(2)、该控制系统的控制器和被控对象分别是和(在①陀螺仪②计算机③加速度表④洲际导弹中选择合适的选项,将序号填写在横线处);(3)、导弹在飞行过程中能克服各种外界环境的干扰,计算机能根据实时数据不断地修正飞行路线,准确地命中目标,这体现了系统的特性(在①目的性②动态性③环境适应性④相关性中选择合适的选项,将序号填写在横线处);(4)、导弹命中方位与设定的目标范围相去甚远,究其原因,不可能是因为造成的(在①设定目标出现问题②计算机处理失控③飞行过程中碰到了飞鸟中选择合适的选项,将序号填写在横线处);15. 小通要利用废旧轮滑鞋上的四个轮子(如图a)制作万向轮,安装到小木凳(如图b)的四个凳脚上。轮子直径φ50mm,厚20mm,中心孔的直径φ5mm,凳脚的截面为50mm×40mm的矩形。
(1)、该制导系统的控制手段和控制方式分别属于和(在①手动控制②自动控制③开环控制④闭环控制中选择合适的选项,将序号填写在横线处);(2)、该控制系统的控制器和被控对象分别是和(在①陀螺仪②计算机③加速度表④洲际导弹中选择合适的选项,将序号填写在横线处);(3)、导弹在飞行过程中能克服各种外界环境的干扰,计算机能根据实时数据不断地修正飞行路线,准确地命中目标,这体现了系统的特性(在①目的性②动态性③环境适应性④相关性中选择合适的选项,将序号填写在横线处);(4)、导弹命中方位与设定的目标范围相去甚远,究其原因,不可能是因为造成的(在①设定目标出现问题②计算机处理失控③飞行过程中碰到了飞鸟中选择合适的选项,将序号填写在横线处);15. 小通要利用废旧轮滑鞋上的四个轮子(如图a)制作万向轮,安装到小木凳(如图b)的四个凳脚上。轮子直径φ50mm,厚20mm,中心孔的直径φ5mm,凳脚的截面为50mm×40mm的矩形。
请设计一个轮子和凳脚的连接件,设计要求如下:
A.安装后的轮子能前进后退,和凳脚之间可360°旋转;
B.轮子和凳脚连接牢固可靠,可承受一定的压力;
C.结构简单,操作方便。
(1)、画出连接件的设计草图,必要时用文字说明。(2)、在设计草图上标注连接件的主要尺寸。(3)、连接件和凳脚属于(从①刚连接②铰连接中选择合适的一项填写在横线上,填写序号)(4)、适合连接凳脚和连接件的是(从①自攻螺钉②铆钉③紧定螺钉中选择合适的一项填写在横线上,填写序号)16. 【加试题】请补全三视图中所缺的三条直线。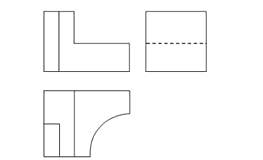 17. 如图所示是汽车水箱缺水报警电路原理示意图,缺水时蜂鸣器发声。使用的集成电路是NE555,其中当3脚输出低电平时,7脚也输出低电平。请仔细分析电路,完成下列问题。
17. 如图所示是汽车水箱缺水报警电路原理示意图,缺水时蜂鸣器发声。使用的集成电路是NE555,其中当3脚输出低电平时,7脚也输出低电平。请仔细分析电路,完成下列问题。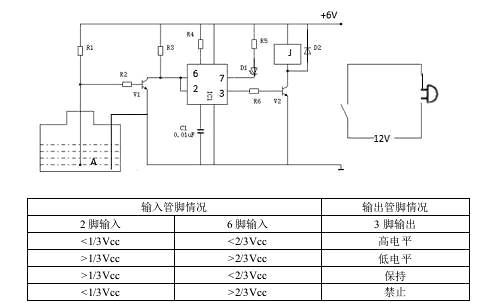 (1)、当水位处于A点以上时,三极管V1处于状态。(在①截止;②饱和中选择一项将序号填入横线中)。此时发光二极管D1。(在①发光;②不发光中选择一项将序号填入横线中)。(2)、当缺水时,555集成电路3脚输出。(在①低电平;②高电平中选择一项将序号填入横线中)。(3)、使用一段时间后,发现三极管V1被击穿,但手头只有一只PNP型的三极管,请你在下图中将PNP型三极管和电阻R3与图中a、b、c、d四点正确连接,使电路实现原有的功能。
(1)、当水位处于A点以上时,三极管V1处于状态。(在①截止;②饱和中选择一项将序号填入横线中)。此时发光二极管D1。(在①发光;②不发光中选择一项将序号填入横线中)。(2)、当缺水时,555集成电路3脚输出。(在①低电平;②高电平中选择一项将序号填入横线中)。(3)、使用一段时间后,发现三极管V1被击穿,但手头只有一只PNP型的三极管,请你在下图中将PNP型三极管和电阻R3与图中a、b、c、d四点正确连接,使电路实现原有的功能。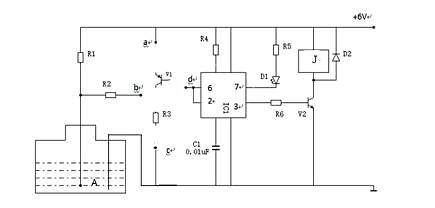 (4)、在更换元件时要进行焊接。以下关于焊接的说法中,不正确的是( )A、焊点若过大是因为焊锡给的太多 B、电烙铁反握操作,动作稳定,长时间操作不宜疲劳 C、元件焊错了要用锉刀把焊点锉掉后再重新焊 D、焊接时应先移开焊料(量够即移)再移开烙铁
(4)、在更换元件时要进行焊接。以下关于焊接的说法中,不正确的是( )A、焊点若过大是因为焊锡给的太多 B、电烙铁反握操作,动作稳定,长时间操作不宜疲劳 C、元件焊错了要用锉刀把焊点锉掉后再重新焊 D、焊接时应先移开焊料(量够即移)再移开烙铁